
post by Feng Zhou (2017 cohort)

The robot dancer was one of four exhibits of “Thingamabobas,” a playful, sensory experience where participants meet and interact with a circus troupe of performative hybrid mechanized sculptures crafted from sustainable and recycled materials. The installation space is a place of wonder. It draws on the absurdities of British artists Heath Robinson and Rowland Emett’s contraptions, Calder’s Circus (1930’s), automata, object theatre, puppetry, and circus acts.
The robot dancer was shown in Lakeside Arts at the University of Nottingham. It attracted many families with children to attend.
We chose the low-cost robot arm – Ned as our dancer. It is also safe working with humans. The Intel RealSense Depth Camera was used as “dancer”‘s eyes to conduct facial recognization.
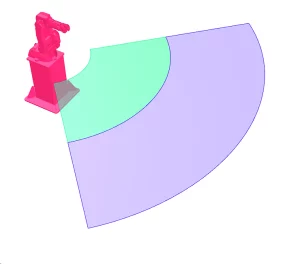
The fan-shaped zone is the range of the camera. It is also the zone in which children interact with the “robot dancer.” When the camera “sees” the face of the nearest child in the green area, it will dance following the child’s face. Since the “robot dancer” has a bad eye condition, it will be hard to tell whether there is anyone around when the nearest child shows in the purple zone. Thus the “robot dancer” will try to look around and search for children. And then, when children stand farther than the purple area, the distance will be over the range of the camera’s detection. So the “robot dancer” will fall asleep. During the same time when children go through “interacting,” ” searching,” and “sleeping” areas, there will be corresponding music being played.
There are still many points that could be improved such as increasing the interacting zone by increasing amount of cameras, switching professional robotic arms to achieve more sufficient movements, and decreasing the delay of interaction.
It was an amazing experience to work with artists and children.
My job was primarily on developing the robotic interacting system base on ROS, including developing the robotic interacting mode based on distance from the users, music playing etc. From this internship, I extended my skill set by learning the ROS system, which enables high flexibility in combining multiple devices into an integrated system. This enabled me to extend my six-axis 3D printing system, which is significant for my PhD research. During the process of developing the interaction mode of the robotic arm, I had a chance to work with dancers, who interacted with the system with dancing motion, through which, I got valuable experience working with dancers who are also aimed users for my PhD research.